




MizLinxがNEDO主催の海洋技術コンペで優勝!未来の水中ロボットに期待
MizLinxがNEDO Challenge for BLUE ECONOMYで輝かしい成果を上げる
株式会社MizLinx(本社:東京都荒川区、代表取締役 CEO 野城菜帆)は、2026年5月、静岡県沼津市で開催された「NEDO Challenge for BLUE ECONOMY」の1次コンペティションにおいて、部門5「船底マッピング・船底状態の把握」で見事優勝を果たしました。このコンペティションは、海洋技術の革新を目指すもので、多くの企業や研究機関が参加した中で、MizLinxの技術が高く評価されました。
コンペティションの目的と意義
「NEDO Challenge for BLUE ECONOMY」は、地球温暖化や外来生物の移動防止など、海洋の様々な課題解決を目指しています。本コンペティションにおいては、革新的な水中計測や観測技術が求められ、多数の参加者がそれぞれのアイデアを競い合いました。MizLinxは、海洋産業の省人化と脱炭素化に向けた最先端の技術を駆使し、優れた成果を上げることができました。
受賞した提案内容
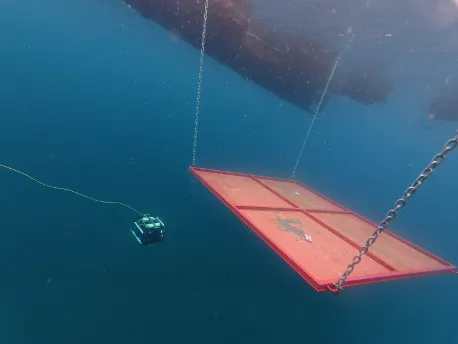
MizLinxが提案した「狭隘環境を潜航可能な船底検査ロボットの開発」は、船底に見立てた鉄板を模擬した環境で行われる競技で、その計測技術が注目されました。当社が開発した水中ドローン「MizLinx UUV」は、狭いスペースでも安定した航行が可能で、AIによる微細な付着物の判定能力が評価され、優勝を獲得する運びとなりました。
受賞コメントと今後の展開
受賞を受けて、MizLinxの取締役石川空氏は「優勝を評価していただき感謝しています。海洋産業における脱炭素化への寄与を目指し、今後も技術開発を続けていきたい」と述べました。今後、MizLinxはこの技術を基にした船底検査ロボットの社会実装に向けた活動を進めていく予定です。
技術的特長
MizLinxの水中ロボットシステムは、以下のような特長を持っています:
1. 移動と位置決めの精度:IMUとDVL、音響ソナーを用いて、波や潮流などの影響を受けず安定した航行が可能。
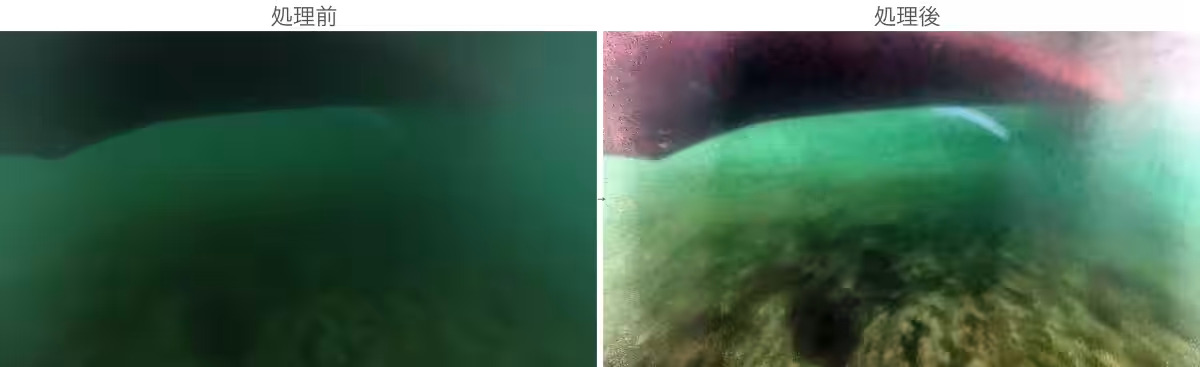
2. 高感度カメラと照明:船底から0.5〜4mの距離で高画質な画像を取得し、自社開発の水中画像鮮明化技術により、低照度の環境でもクオリティを保ちます。
3. AIによる解析技術:独自のAIモデルを利用して、船底画像から付着物を自動的に判別します。
社会への応用
MizLinxの技術は、海運業界での実用化に向け、今後ますます発展していくことでしょう。この受賞はその一歩であり、海洋環境における効率化と省人化に貢献することが期待されています。具体的には、従来のダイバーやROVに頼ることなく、自律航行可能な水中ロボットを利用することで、船底検査プロセスを大幅に効率化できる可能性があります。
MizLinxについて
株式会社MizLinxは、2021年に設立され、海洋モニタリングシステムや水中ロボットの開発を行っています。海洋における課題に向け、最先端の技術革新を目指し、社会的な実装も視野に入れた活動を行なっています。今後の展開が非常に楽しみです。
詳細な情報については、MizLinxの公式サイトをご覧ください。

トピックス(その他)




【記事の利用について】
タイトルと記事文章は、記事のあるページにリンクを張っていただければ、無料で利用できます。
※画像は、利用できませんのでご注意ください。
【リンクついて】
リンクフリーです。